 バッテリーは搭載するサーボが3個だけなので、300mAhもあれば充分なのですが、バラスト代わりに大きなサイズの バッテリーを積む事にしました。 サーボも受信機もハイボルテージ対応なので、2セルLi−poをそのまま使用します。 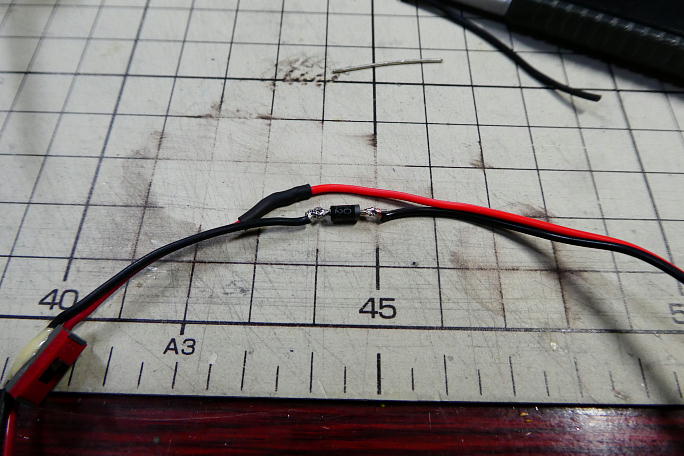 ハイボルテージ環境ではありますが、逆接防止と充電直後の過電圧防止のために、ダイオードを一個だけ挿入します。  電源コードとスポイラー用の延長コードです。 バッテリーの充電はバランスコードから充電しますので、充電ポート は設けません。 |
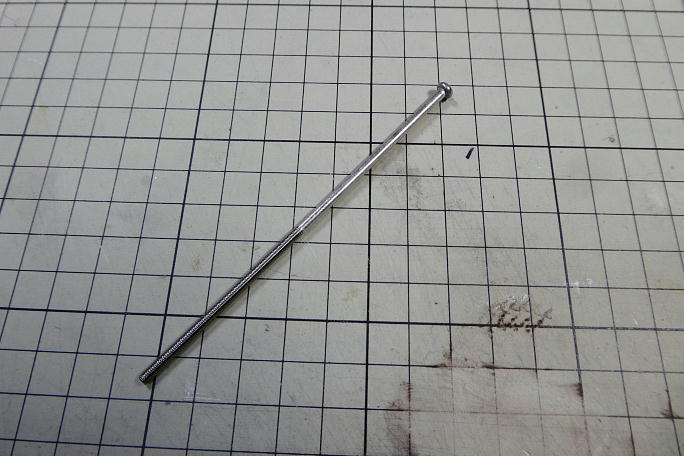 曳航フックを作ります。 素材はステンレスのM3半ネジボルトです。 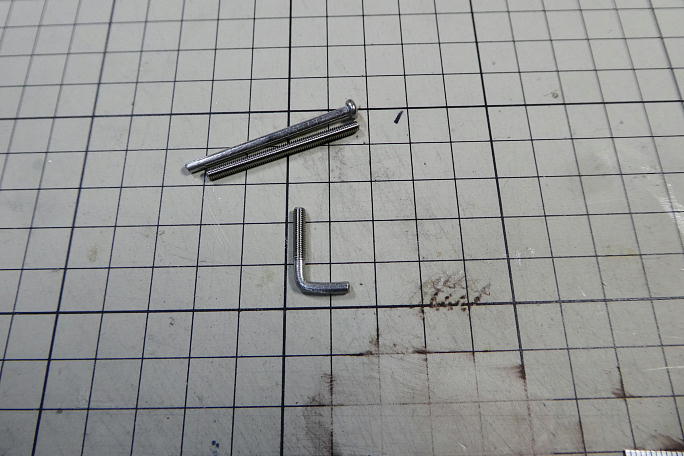 万力にボルトを咥えて、ハンマーで叩いて曲げて行きます。 不要部分をカットして、角を丸めておきます。  ネジ穴のフイルムをハンダゴテ゛溶かし開けます。  フックをねじ込んで、ナットで回り止めとします。 |
 機体を組んで重心位置を測定します。 当初、電動版の重心位置に合わせて87ミリで調整しました。 この時のノーズ バラストは30グラムでした。  突っ込み基調だったので、ノーズバラストを抜いた調整飛行後に重心位置を測定しました。 ノーズバラスト15グラム 抜いて重心位置は91.5ミリで釣り合いました。 |