 ラダーのリンケージもエレベーター同様にサーボとラダー舵面のニュートラルを合わせて、ロッドをカット、接着部を サンディングしておきます。   簡易ニュートラル出しツールでラダーのニュートラルを合わせ、サーボを1520μsのニュートラルに合わせて、ロッド アジャスターとリンケージロッドを低粘度瞬間接着剤で接着します。  ラダー、エレベーターリンケージ完了です。 |
 ラダーの動きが渋いと思ったら、リンケージロッドと垂直尾翼のカンザシが干渉していました。  リンケージが当たる部分のカンザシを削って道を作り、干渉の解消をしました。 IDS組の機体に付属したリンケージロッジは、先端のピアノ線が曲げられていて、干渉はありませんでした。 私の機体は付属するリンケージロッドを間違えたのか、ストレートの、エレベーターとラダー用は同じリンケージロッドが 付属していました。 |
  サーボテスターを使って、モーターを低速で回転させて、そのシャフトを軽く触れる事でモーターの回転方向を確認します。 今回、新規採用のDUALSKYのアンプを使用します。 このアンプは対モーター用のコードが短いので、コードは付属のコードを無加工で使用しました。  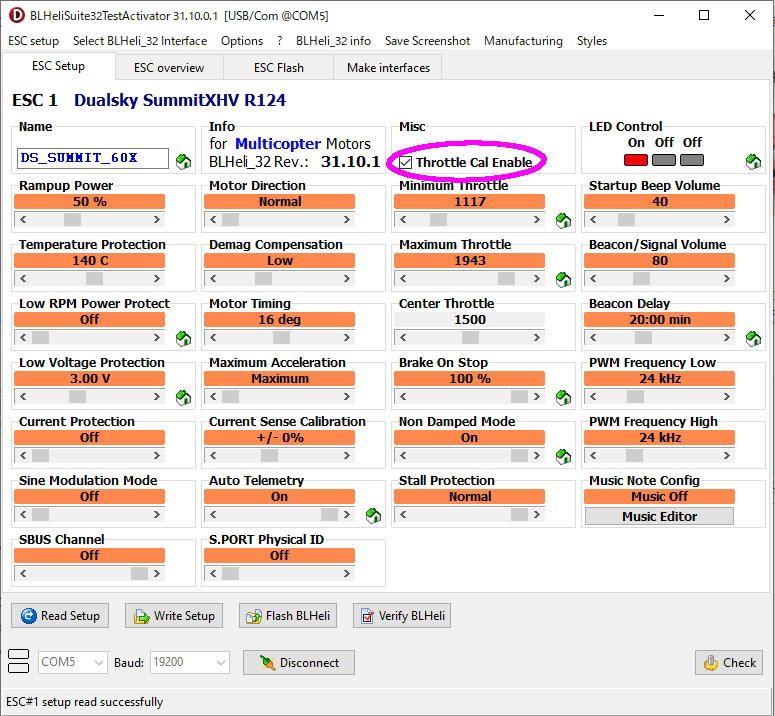 ブレーキ設定などはデフォルトで100%設定になっていますので、スロットルのキャリブレーション設定のみで使用出来ます。 それ以外の細かな設定は別売りのUSBアダプターを介して、PCで設定することになります。 このUSBアダプター、Windows7のPCでは認識してくれませんでした。 また、ソフトはオープンソースの物をダウンロード して使用しますが、ESCのバージョンによって使うソフトのバージョンも変わりますので注意が必要です。 ちなみに、私の購入した個体のファームウェアはプロトタイプのソフトらしく、一つ古いバージョンのソフトが必要でした。 "Dualsky_SummitXHV_R124"
pre-release Rev31.x prototype sample. |
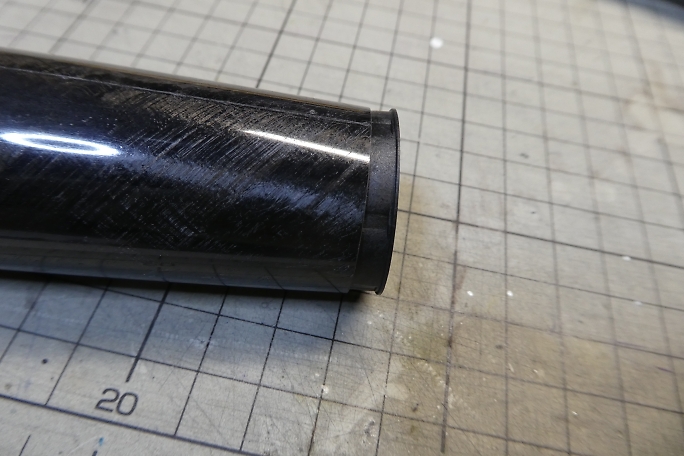 今回から、市販の樹脂製モーターマウントが付属します。 いつもは胴体側を削らないとマウントが入らなかったのですが、 今回の物は無加工で良いサイズ感となっています。 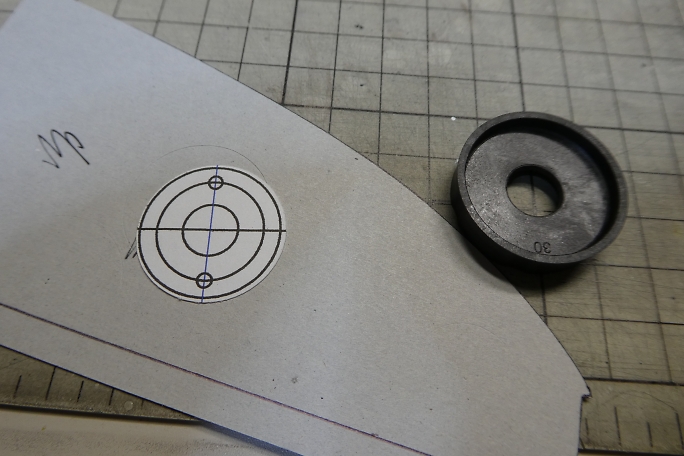 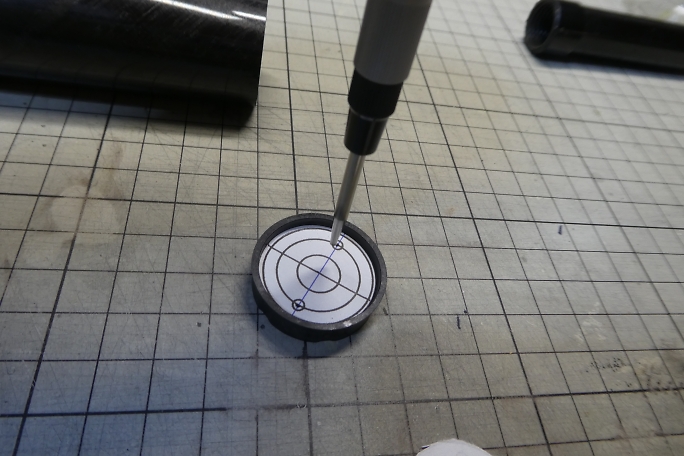 PCで作ったモーター取り付け穴のテンプレートをスプレー糊でモーターマウントに貼り付け、穴位置にポンチを打ちます。  リュータースタンドを使って、モーターマウントの穴開けを行います。 1.5ミリドリルから始めて、少しずつ太くし、3ミリドリル で仕上げます。 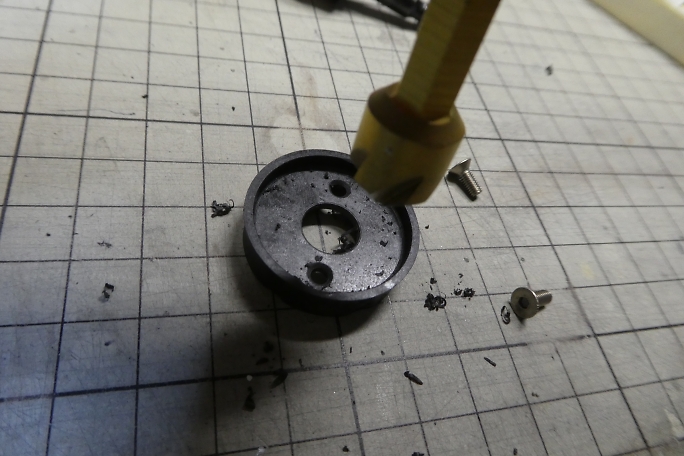 皿ネジを使用するので、モーターマウントに皿穴加工をします。 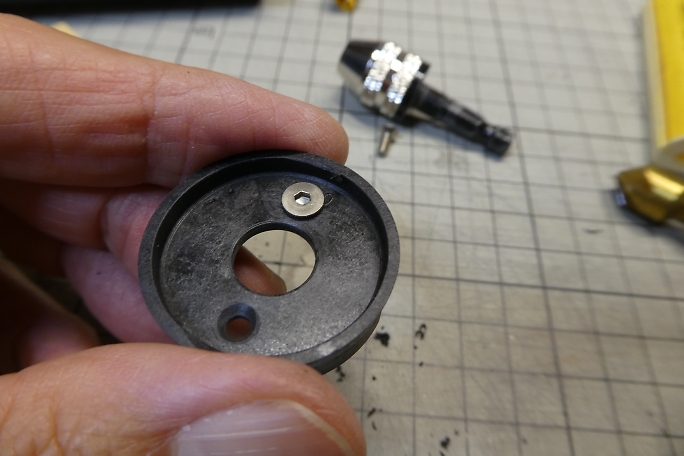 使用するボルトを入れて見ました。 |
  胴体とモーターマウントの接着部をサンディングしておきます。   胴体とモーターマウントの接着部を硬化促進剤で拭いておきます。  実際にモーターを入れて見て、アンプ、コードの収まりの良い角度にモーターマウントをはめ込みます。  胴体とモーターマウントの隙間、胴体内部からも低粘度瞬間接着剤を流してモーターマウントを接着します。 モーターマウントのフランジ部分は胴体外周とほぽ同サイズのために、削る必要もありませんでした。 |