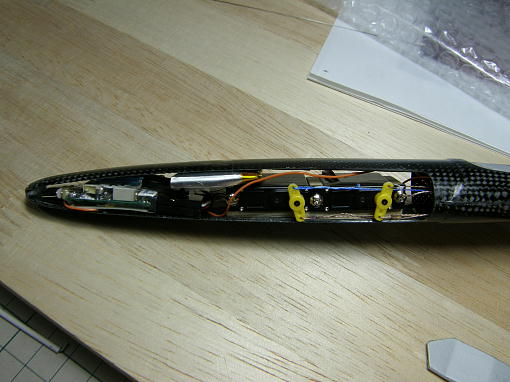
 メカはこの様に搭載しています。 左が前で、ノーズに受信機その後ろにラダーとエレベーターのサーボです。 サーボは耳の部分を重ねて、2*8のトラスタッピングネジ3本でサーボ2個を固定 しています。 受信機とバッテリーはセロテープでフレームに固定しています。  裏側にはコード類を縛ってまとめています。 当初、押し込んで置けば良いかと考 えていましたが、思ったよりノーズコーンとの隙間が小さく、ノーズコーンの抜き差し の際にコード類が引っかかるために束ねました。  製作時は右の135mAhの電池を使っていましたが、思った以上に消費電力が少 ないので思い切って左の100mAhの物に変えました。 重量は1グラム強しか違いませんが小さくなった分搭載位置の自由度が増しました。 |
 リンケージはお馴染み、PEラインによるプルプルです。  エレベーター側はターンバック方式になっています。 この機体ではラダーがパイプ側面にオフセットされていますので、開ける穴が一個 少なくて済みます。 |
主翼の製作 主翼は完成されていますし、この機体はラダー機ですのでメーカーの指示では特に 加工をするところはありません。 メーカーの指示ではランチは翼端をそのまま掴んで投げるようになっています。 ですが、よりランチを正確な物にするため、何らかのランチデバイスを付けてあげた いと考えていました。 パイプや板状のペグを付けるか、一時期流行ったグリップ等 があります。 この機体の主翼は機体重量に対してかなりの強度を持っていますので、回らずに投 げる事が可能ですので、静止時にしっかり機体を保持出来るグリップを付けてあげる 事にします。 グリップは5*5のスクラップバルサを削って形にして、割れ防止にマイクログラスを 貼って仕上げました。  グリップは底部を主翼上面のカーブに合うように成型して、翼端から20ミリの所に 進行方向に対して0度の角度で接着します。 接着面を紙テープで養生してサンディング後、5分エポキシで接着しました。  翼端の補強が斜めに貼ってあるので、グリップが外向きに着いているように見えま すが、ちゃんと真っ直ぐになっています。 グリップに人差し指と中指を掛けて、主翼下面を親指で押さえる様にして投げます。 回転無しでも充分な高度が得られます。 |